

ʻO mākou kekahi o nā mea kūʻai aku ʻoi loa FA One-stop ma Kina. ʻO kā mākou huahana nui me ka servo motor, planetary gearbox, inverter a me PLC, HMI.Brands me Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki , Scheider, Siemens , Omron and etc.; Ka manawa hoʻouna: I loko o 3-5 mau lā hana ma hope o ka loaʻa ʻana o ka uku. Ke ala uku: T / T, L / C, PayPal, West Union, Alipay, Wechat a pēlā aku
Spec Detail
| 'ikamu | Nā kikoʻī |
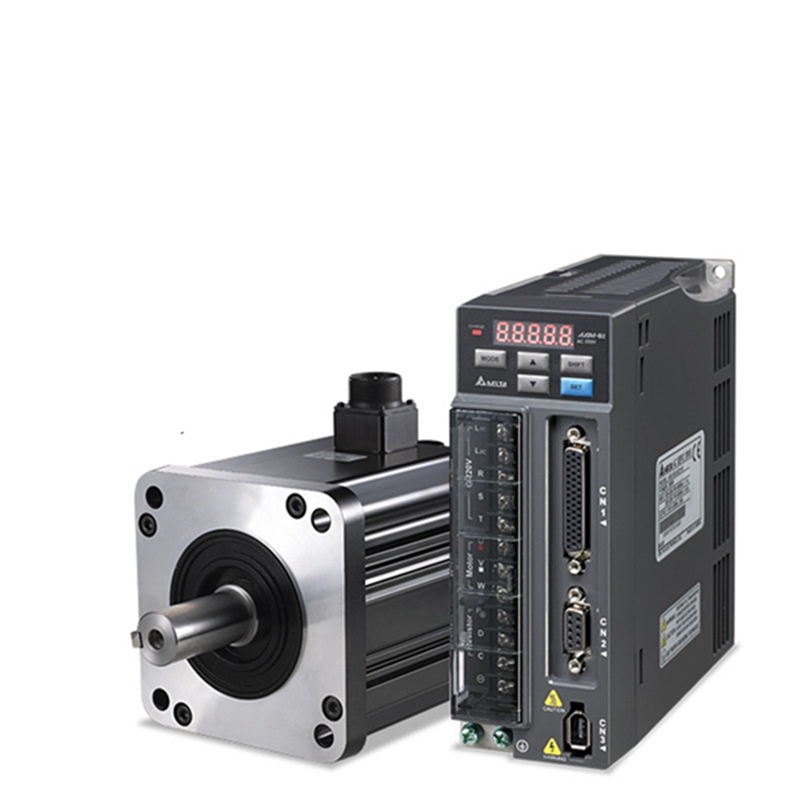
| Helu hapa | ECMA-C10602RS |
| Inoa Huahana | ʻO ka ʻenekini uila AC Servo Motor |
| ʻAno Servo | AC Servo |
| Kulike Servo Motor | ASD-A2-0221-L, ASD-A2-0221-MASD-A2-0221-U, ASD-A2-0221-E |
| Voltage koho | 220VAC |
| ʻAno Encoder | ʻAno hoʻonui, 20-bit |
| Ka nui o ka pahu kaʻa | 60mm |
| Ke 'ano o ka Anawaena Poha a me ka Sila Aila | Alanui (me nā puka wili paʻa), me ka haki, me ka sila ʻaila |
| Anawaena Shaft maʻamau | S=8m |
| Hoʻopuka mana helu ʻia | 200W |
| ʻO ka torque helu ʻia (Nm) | 0.64 |
| Max. ke kukui (Nm) | 1.92 |
| Hoʻoholo ʻia ka wikiwiki | 3000 rpm |
| Max. ka māmā holo | 5000 rpm |
| Heluhelu ʻia i kēia manawa (A) | 1.55 A |
| Max. ʻo kēia manawa (A) | 4.65 A |
| Ka helu mana (kW/s) | 22.4 |
| Rotor inertia (× 10-4kg.m2) | 0.19 |
| Mechanical mau (ms) | 0.75 |
| Paʻa mau-KT (Nm/A) | 0.41 |
| Voltage mau-KE (mV/(r/min)) | 16.0 |
| ʻO ke kūpaʻa lima (Ohm) | 2.79 |
| ʻO ka hoʻoulu ʻana o ka mea kaua (mH) | 12.07 |
| mau uila (ms) | 4.30 |
| Papa hoʻopulapula | Papa A (UL), Papa B (CE) |
| Kūleʻa hoʻokaʻawale | > 100 M ohm , DC 500 V |
| Ka ikaika hoʻokaʻawale | 1.8k Vac, 1 kekona |
| Kaumaha (kg) (me ka pauku) | 1.5Kg |
| Radial max. hoʻouka (N) | 196 |
| Axial max. hoʻouka (N) | 68 |
| Ka helu mana (kW/s) (me ke kaʻa) | 21.3 |
| Rotor inertia (× 10-4kg.m2) (me ka paʻa) | 0.19 |
| Mechanical mau (ms) (me ka pauku) | 0.85 |
| ʻO ke koʻo paʻa paʻa Nt-m(min)] | 1.3 |
| Hoʻohana mana kaʻa (ma 20 °C) [W] | 6.5 |
| Ka manawa hoʻokuʻu ʻana o ke kaʻa [ms (Max)] | 10 |
| Ka manawa huki hoʻomaha [ms (Max)] | 70 |
| Papa haʻalulu (μm) | 15 |
| Hiki ke haʻalulu | 2KG |
| Ka helu IP | IP65 |
Ka Lapa a me nā Palaki
ʻO ka Rubber a me nā plastics nā mea maʻamau i hoʻohana ʻia i ko mākou ola i kēlā me kēia lā a me ka pale aupuni a me ka ʻenehana aerospace i nā kaʻa, nā mīkini, nā uila, a me nā hale. Ke piʻi nei ka hoʻokele waiwai ʻōmaʻomaʻo honua a me ka ʻike kaiaola, nā mea hou, ʻenehana a me nā noi e hoʻolalelale i ka hoʻomohala ʻana a me ka hoʻololi ʻana o ka ʻoihana rubber & plastics.
Hoʻolaʻa ʻia ʻo Delta i ka ʻoihana kaila a me nā plastics e hāʻawi ana i nā makahiki o ka ʻike i ka mana, uila, a me ka automation ʻoihana. Hāʻawi ʻo Delta i kahi ākea o nā huahana, e like me nā kaʻa kaʻa AC kaumaha, nā PLC, nā HMI, nā mea hoʻokele wela, nā mika mana a me nā lako mana o ka ʻenehana, kahi hopena mīkini hoʻoheheʻe uila āpau (me nā panela mana, nā mea hoʻokele kikoʻī, AC servo drives & motors, a me nā mea hoʻokele wela) ʻO ka nui o nā makana a Delta e hoʻokō i ke koi no ka mālama ʻana i ka ikehu, pololei, ka wikiwiki kiʻekiʻe a me ka hoʻokele ʻōnaehana pono no ka mea hao a me nā lako plastik.
Nā Pūnaehana ʻAunoa Waiwai
Hoʻohana nui ʻia nā ʻōnaehana wai no ka mālama ʻana i nā kaʻina paʻakikī o nā ʻōnaehana hoʻoheheʻe ea, nā mea hoʻoheheʻe ea, a me nā mea kanu mālama wai. ʻO ka hoʻololi ʻana i ka hoʻokele kaʻina hana lima me kahi ʻōnaehana automated e hoʻokō i nā hana maikaʻi a paʻa me ka hiki ke hoʻoili ʻia, ka mana mau, a me ka nānā kikowaena.
Hoʻolaʻa ʻia ʻo Delta i ka hoʻomohala ʻana i nā huahana automation hilinaʻi a maikaʻi hoʻi, e like me nā PLC, nā kaʻa kaʻa AC, nā servo drive a me nā kaʻa, HMI, a me nā mea hoʻokele wela. No nā noi kiʻekiʻe, hāʻawi ʻo Delta i nā PLC waena me nā algorithms maikaʻi loa a me ke kūpaʻa. Ke hoʻohana nei i kahi hoʻolālā modular me nā modula hoʻonui like ʻole no ka scalability ʻōnaehana, nā hiʻohiʻona PLC waena waena o Delta i hoʻohui ʻia i ka polokalamu polokalamu PLC a me kahi interface hana me nā poloka hana he nui (FB). Hāʻawi pū ʻo Delta i nā ʻano hoʻololi Ethernet ʻoihana e hoʻopili i nā ʻoihana ʻenehana like ʻole no ka nānā ʻana i ke kaʻina hana. ʻO nā ʻōnaehana automation maikaʻi loa, kūpaʻa, a hilinaʻi hoʻi e hoʻokō i nā koi no ka nui o nā noi ʻōnaehana wai.
Mekini Laau
Ke hilinaʻi nui nei ka hana ʻana a me ka hoʻoponopono ʻana i nā mea hana kuʻuna i ka hana lima kūpono ʻole a kūlike ʻole. Hoʻolako ʻia me kahi hana maʻalahi wale nō, pono nā mīkini hana lāʻau maʻamau i nā mīkini ʻokoʻa no nā kaʻina hana paʻakikī, e like me ka wili ʻaoʻao a me ke kahakaha ʻana. ʻO ka hana monotonous ka mea paʻakikī i ka hoʻokō ʻana i ka makemake o ka mākeke, a ke ʻimi nei ka ʻoihana mīkini hana lāʻau i kahi hopena ʻoi aku ka holomua.
No ka hoʻokō ʻana i nā koi noi, hōʻike ʻo Delta i kāna hopena hoʻonā neʻe hou no ka mīkini hana lāʻau. Me ka EtherCAT a me DMCNET fieldbus i kākoʻo i ka PC-based a me CNC controllers, Delta's advanced woodworking machinery solutions hiki ke hoʻohana nui ʻia i nā mīkini hōʻailona automated, nā mea ala me nā ʻōnaehana conveyor maʻalahi, nā mea hoʻokele PTP, 5-ʻaoʻao wili a me nā mīkini ʻeha, nā kikowaena mīkini no ka hana lāʻau, nā mīkini puka lāʻau paʻa a me nā mīkini mortise & tenon.










